


RhinoRobot est un plugin pour Rhinoceros 3D de simulation et programmation hors-ligne complet, abordable, et facile à prendre en main pour tous types d'applications sur robots industriels.
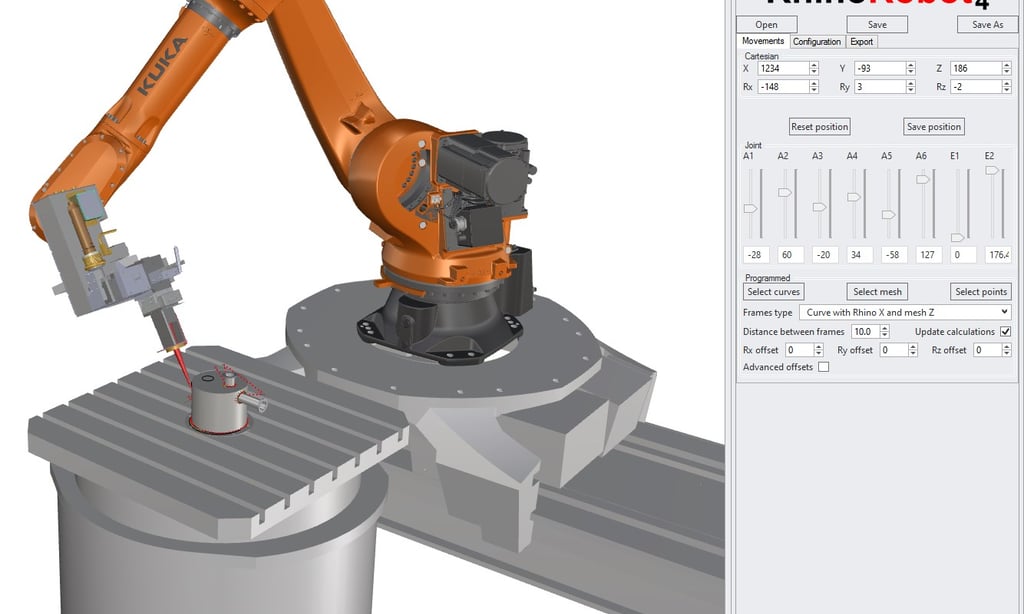
RhinoRobot est intégré au modeleur 3D Rhinoceros et utilise son environnement de programmation pour procurer une interface simple et claire.
La CAO et la programmation hors ligne robotique sont ainsi réunies pour une interaction facile entre les objets virtuels et la fabrication.



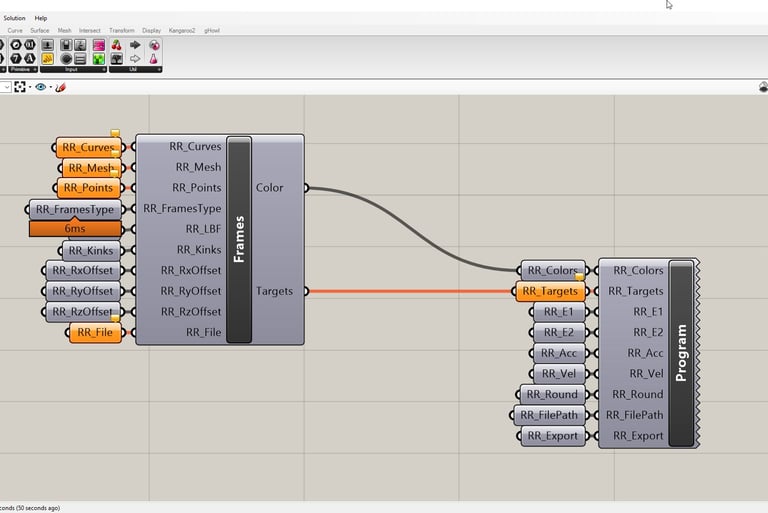
RhinoRobot fonctionnant en partie avec Grasshopper, il est ouvert aux modifications et adaptations. L'utilisateur peut personnaliser Grasshopper pour incorporer ses propres stratégies métiers et customiser le post-processeur.
Fonctionnalités:
Choix du robot parmi toute la gamme Kuka, Universal Robots, ABB, Staubli, Yaskawa, Fanuc, ...
Import de la géométrie de l'outil et de son centre outil
Définition de trajectoire outil avec différents choix de gestion de son orientation: usinage, soudure, détourage, encollage, impression 3D, scan, pick'n'place, découpe jet d'eau, ...
Multi trajectoires avec combinaison de points enregistrés et de mouvements créés sur pièces
Simulation de trajectoire avec visualisation et gestion de singularités
Détection de collisions et des mouvements hors limites du robot
Modification de la trajectoire avec édition de points
Export du programme avec intégration de fonctions personnalisées
Programmation avec pièce portée et outil fixe
Et sur la dernière version:
Double axe linéaire (pour robot sur portique par exemple)
Option licence flottante (connexion internet nécessaire)
Détection de collisions 5 fois plus rapide
Filtrage de mouvements sur axes externes
Export glTF pour visualisation de simulation sur tous appareils, y compris VR et AR
Le développement de RhinoRobot est basé sur les retours utilisateurs. Dites nous ce qui vous serait utile dans une prochaine version